Après quelques années de bons et loyaux services, ma petite CNC commençait à montrer des signes de faiblesse et un peu de jeu. En outre, la broche de 250 W était vraiment trop légère pour usiner sereinement de l’aluminium.
Je me suis donc mis en quête d’un nouveau châssis plus robuste, permettant d’accueillir une broche plus puissante, et surtout disposant de vis à billes et non plus de vis trapézoïdales, et j’ai comme souvent trouvé mon bonheur sur Aliexpress.


L’idée était de conserver les moteurs ainsi que l’électronique de commande.
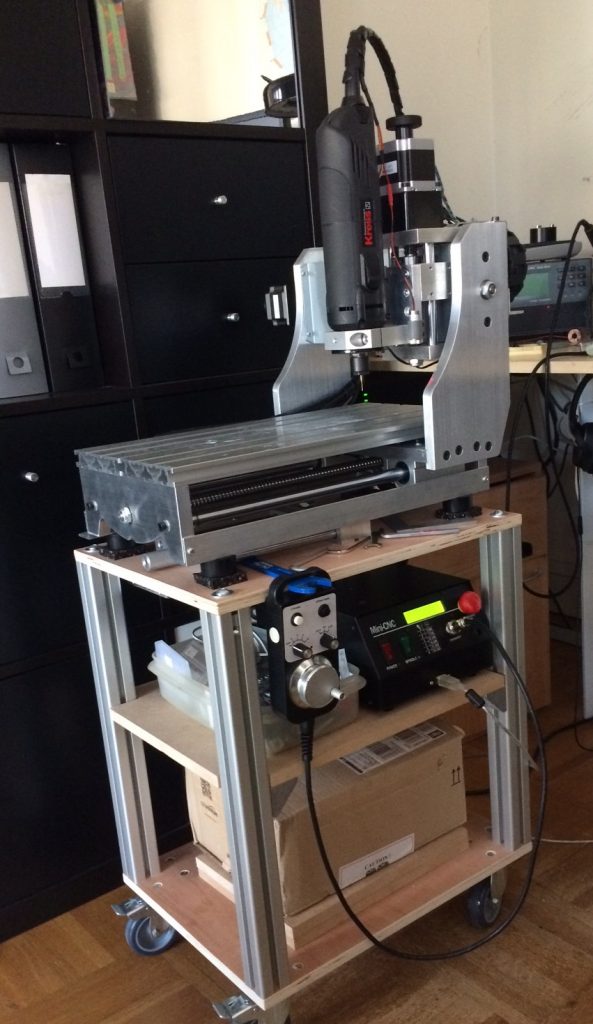
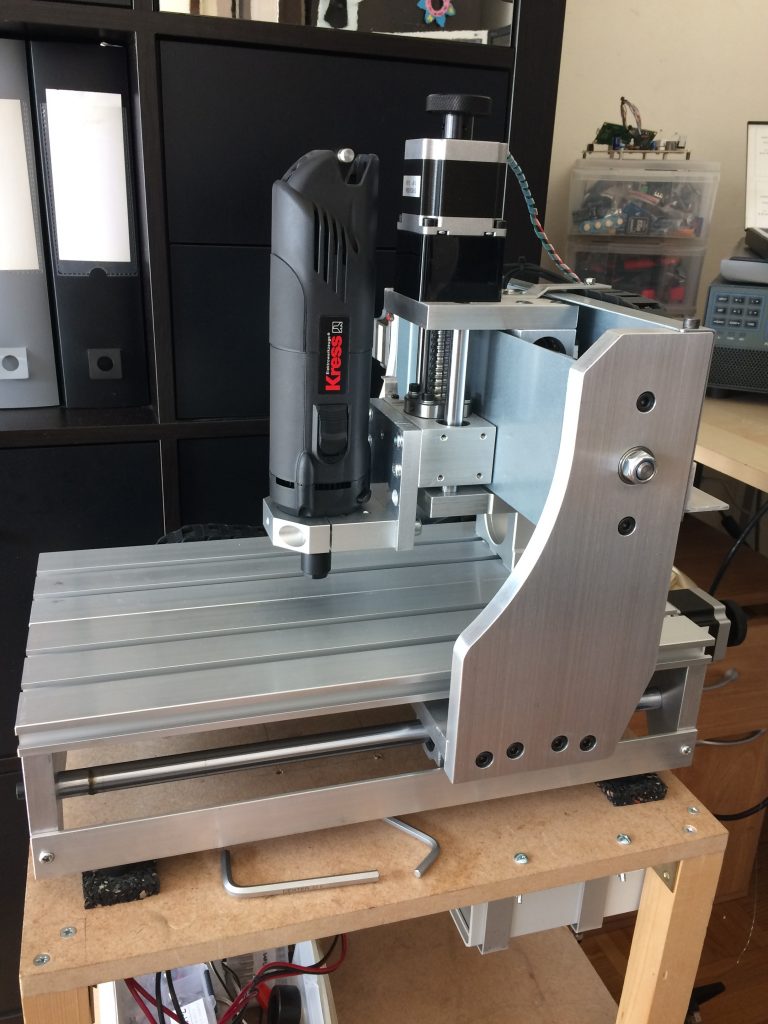
Une fois le kit monté, ça fait plus sérieux :
Avant

Après
Les plus attentifs d’entre vous auront noté que les moteurs ont également été remplacés. Les modèles originels, de 1.6 A/phase étaient sous dimensionnés pour usiner de l’aluminium, je les ai remplacés par des 3 A/phase.
J’ai fait le choix d’une broche Kress FME-1050 réputée pour sa précision et sa fiabilité dans le monde des CNC amateur.

L’ancienne broche d’origine était alimentée en 48V et sa vitesse de rotation variait en fonction du signal PWM issu du contrôleur Grbl. La nouvelle est alimentée en 230 V et dispose de son propre variateur. J’ai donc remplacé l’alim 48 V et le variateur par un simple relais SSR. L’alimentation des moteurs pas-à-pas sous 24 V est confiée à une alimentation Meanwheel externe.
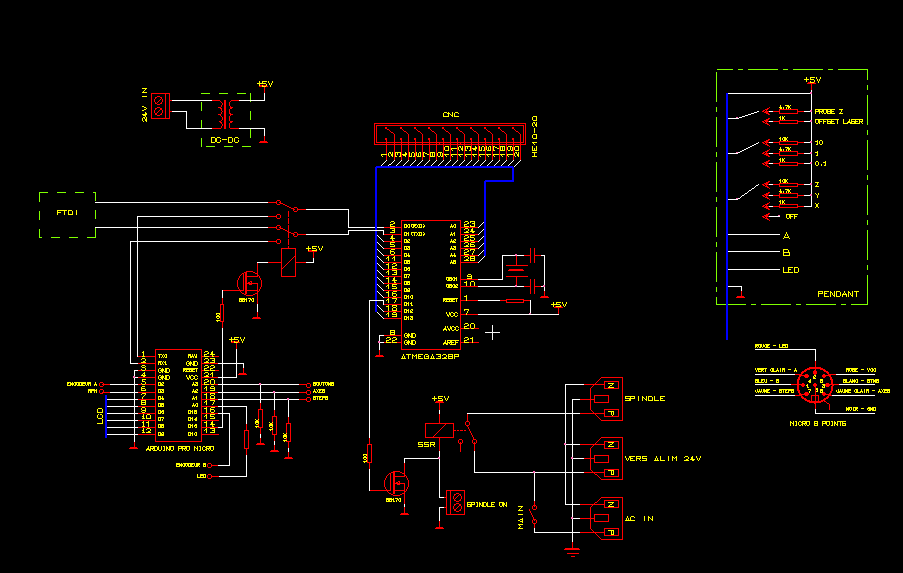
Au point où j’en étais, j’ai également remplacé l’Arduino UNO hébergeant le contrôleur Grbl par un ATmega328p et un module FTDI pour la communication en USB. Le but principal est de gagner de la place pour une nouvelle fonctionnalité : une télécommande
L’idée consiste donc à ajouter un second Arduino qui lit les informations de la télécommande et les transmet à Grbl. Le module FTDI permettant le dialogue avec le logiciel de contrôle hébergé sur le PC ne pouvant être câblé en parallèle du nouvel Arduino, il a fallu ajouter un relais assurant la commutation du port série.
Le choix s’est porté sur un Arduino Pro Micro disposant d’un micro-contrôleur ATmega32u. J’avais essayé précédemment avec un ATmega328p standalone, (le même sur sur les cartes UNO, Nano, Pro Mini, etc…) mais celui-ci c’est montré incapable de dialoguer à 115.200 bits/s sur un second port série avec la librairie SoftwareSerial.
Le principe ressemble donc à ceci :
Télécommande trouvée pour 30 € encore une fois sur Aliexpress, modifiée car je trouvais la présence d’un bouton d’arrêt d’urgence inutile à cet endroit. En effet, la télécommande ne sert qu’à positionner la broche avant usinage. Lorsque celui-ci est lancé, il est plus facile en cas de nécessité de presser le bouton d’arrêt d’urgence situé sur le contrôleur.

Après

L’Arduino gérant la télécommande n’ayant rien à faire pendant l’usinage, j’en profite pour lui faire compter les tours de la broche à l’aide d’un détecteur infra-rouge que je lui ai greffé (de la chirurgie de précision). Le principe est simple, une interruption lui est envoyée par le capteur infra-rouge à chaque tour, il n’y a plus qu’à les compter.
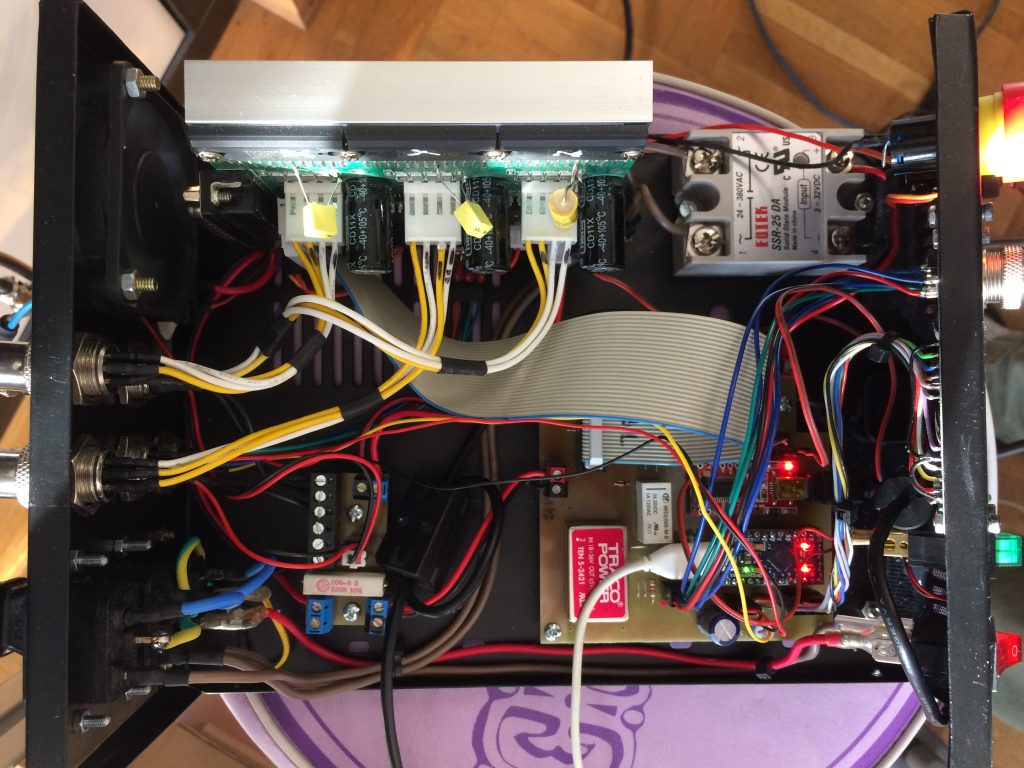
Le boitier du contrôleur a quelque peu évolué… 🙂
Avant

Après

Et voici le résultat final, après avoir également construit un chariot plus robuste, la nouvelle machine pesant 9 kg de plus que la précédente.